Bioinspired Microfabricated Adhesive for Atraumatic Tissue Manipulation in Minimally Invasive Surgery
DOI:
https://doi.org/10.64504/big.d.v2i4.293Abstract
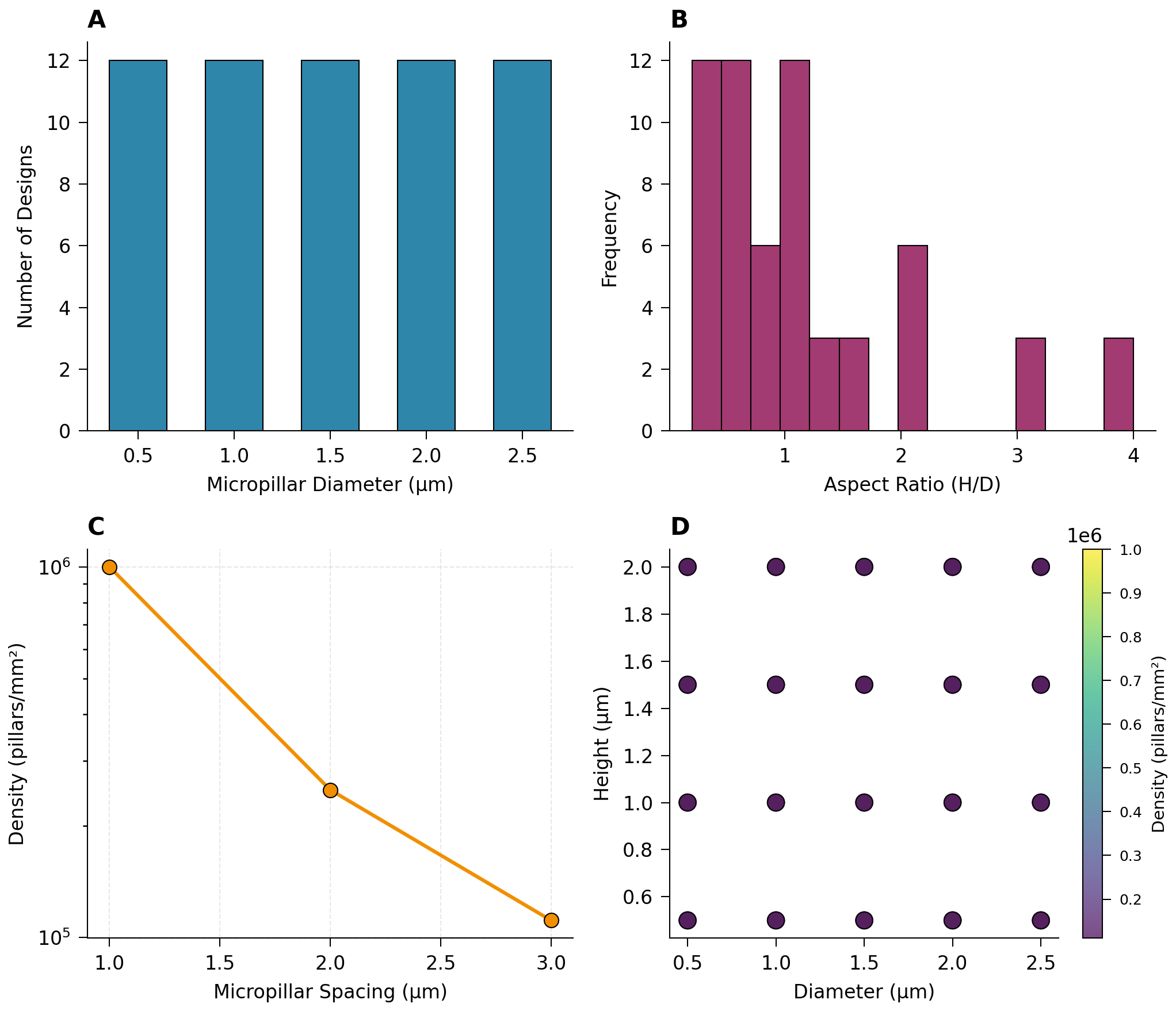
Minimally invasive surgery (MIS) has transformed modern healthcare by reducing patient trauma and recovery time; however, safe manipulation of delicate, soft tissues remains a major challenge. Conventional graspers frequently apply excessive compressive forces, leading to iatrogenic injury and postoperative complications. To address this issue, we present a bioinspired microfabricated adhesive surface designed for atraumatic tissue handling in wet surgical environments. The proposed design draws inspiration from the hierarchical fibrillar architecture of gecko footpads and employs biocompatible polyimide micropillar arrays fabricated via photolithography and reactive ion etching. The adhesive performance was systematically evaluated on ex vivo porcine tissues, including liver, heart, kidney, and spleen, under simulated physiological conditions. The influence of micropillar geometry—specifically diameter, height, and density—on adhesion strength and tissue safety was quantitatively analyzed using a custom-built micro-force measurement platform. The optimized configuration achieved an adhesion force of up to 4.2 N on cardiac tissue in phosphate-buffered saline, primarily driven by van der Waals and capillary interactions. Histological analysis confirmed minimal tissue trauma, with average damage scores reduced by more than 40% compared with conventional surgical graspers. These results demonstrate that gecko-inspired microstructured adhesives can provide strong, reversible, and controllable wet adhesion with negligible tissue damage. This work establishes a promising foundation for the development of next-generation minimally invasive surgical instruments that combine mechanical reliability with intrinsic tissue safety.
Downloads
Downloads
Published
Versions
- 2026-05-08 (3)
- 2026-01-23 (2)
- 2025-12-09 (1)
How to Cite
Issue
Section
Categories
License
Copyright (c) 2025 BIG.D

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.