Continuous Neural Control of Intelligent Prosthetic Hand Based on Forearm Agonist-Antagonist Myoneural Interface
DOI:
https://doi.org/10.64504/big.d.v2i4.295Abstract
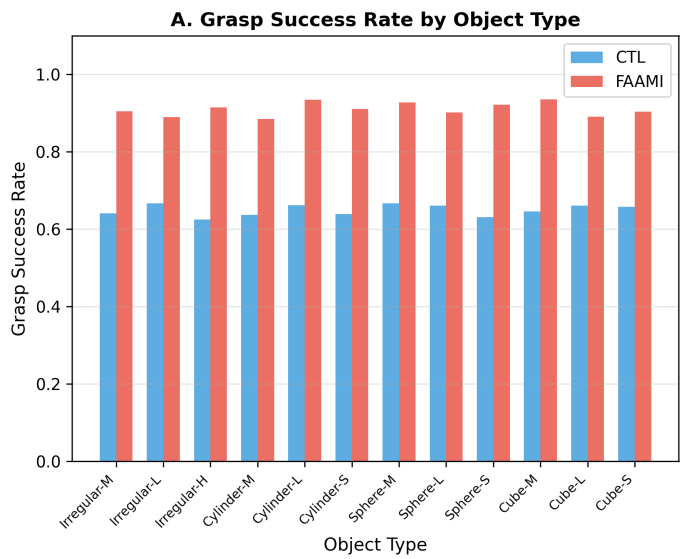
Upper-limb loss profoundly disrupts fine motor function and deprives individuals of intrinsic proprioceptive awareness of their missing limb. Existing myoelectric prostheses rely predominantly on pattern-recognition (PR) control strategies that convert complex, continuous motor intentions into discrete gesture classes, resulting in limited dexterity, discontinuous motion, and the absence of physiological sensory feedback. To overcome these constraints, this study presents a closed-loop prosthetic hand system integrating a Forearm Agonist–Antagonist Myoneural Interface (FAAMI) with continuous neural decoding. FAAMI surgically re-establishes agonist–antagonist mechanical coupling in the residual limb, enabling stretch-induced activation of muscle spindles and thereby restoring physiologically encoded afferent signals related to joint position and velocity. Building on this biological interface, a hybrid Convolutional Neural Network–Long Short-Term Memory (CNN–LSTM) architecture continuously maps 64-channel high-density EMG into seven-degree-of-freedom kinematic trajectories. A controlled study involving sixteen trans-radial amputees (FAAMI: n=8; control PR users: n=8) demonstrated substantial functional and perceptual benefits. FAAMI reconstructed muscle-spindle afferents to approximately 20% of intact physiological levels and increased antagonist synergy by more than 200%. Continuous decoding achieved high kinematic fidelity (r = 0.92±0.04), enabling smooth, coordinated movements that outperform PR-based systems in grasp success (+40%), completion time (–55–65%), force regulation (+33%), and tool-use proficiency (+86%) (all p < 0.01). FAAMI users further exhibited superior performance in Activities of Daily Living and reported higher satisfaction and embodiment scores. These results provide mechanistic and empirical evidence that integrating peripheral proprioceptive reconstruction with continuous neural decoding represents a fundamental step toward biomimetic upper-limb prosthetic control, offering a clinically scalable pathway for next-generation neuroprosthetics.
Downloads
Downloads
Published
Versions
- 2026-05-08 (3)
- 2026-01-23 (2)
- 2025-12-09 (1)
How to Cite
Issue
Section
Categories
License
Copyright (c) 2025 BIG.D

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.